
De Michigan Scientific Hoge resolutie wielpulstransducer (WPT) is een optische encoder die: hecht aan de wielmoeren van het wiel van een voertuig. De WPT wordt vaak gebruikt om de positie en snelheid van een voertuig te volgen voor toepassingen zoals wagenparkbeheer en autonoom voertuig volgen. Deze casestudy demonstreert de nauwkeurigheid van het samen gebruiken van twee wielpulstransducers, waarbij de positie- en snelheidsmetingen worden vergeleken met GPS-gegevens.
Hoe het werkt
Het signaal van de encoder wordt gebruikt om de hoekpositie en snelheid van het wiel te berekenen. Gegevens die zijn vastgelegd door twee WPT's aan weerszijden van de auto kunnen worden gemiddeld om het midden te vinden, waardoor de meest nauwkeurige weergave wordt gegeven van de afstand en snelheid die de auto heeft afgelegd. Voertuigen voor het in kaart brengen gebruiken vaak WPT's om onderbrekingen in het GPS-signaal te compenseren, waardoor de afgelegde afstand tijdens het signaalverlies kan worden gevolgd. In deze studie presteerde de hoge resolutie van de WPT-gegevens veel beter dan die van de GPS-sensor die werd gebruikt vanwege de hoge bemonsteringsfrequentie van 10,000 Hz.
Test Setup
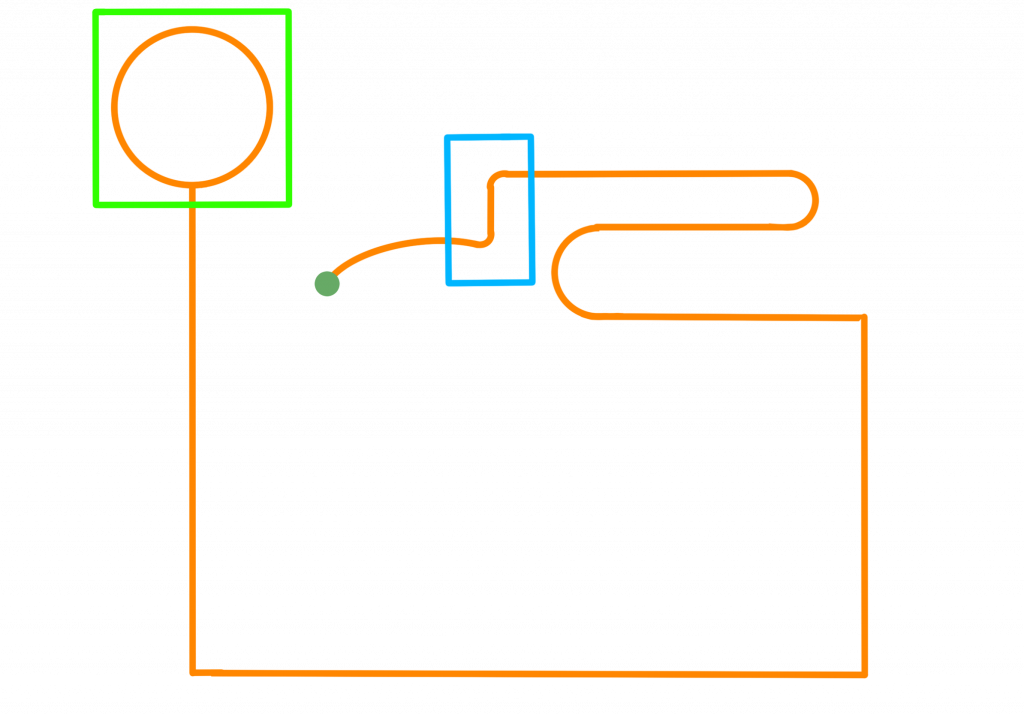
Om de resultaten van de Wheel Pulse Transducer te vergelijken met de GPS-resultaten, werden twee WPT-systemen aan een voertuig bevestigd, één aan de rechterachterzijde en één aan de linkerachterzijde. De transducers zijn op de achterwielen gemonteerd, zodat de draaibeweging van de voorwielen niet in de data hoeft te worden gecompenseerd. Een GPS-apparaat werd bovenop het voertuig geplaatst, in het midden van het dak boven de achterwielen, waar het de meest nauwkeurige meting zou geven. Links en rechts WPT afstanden en snelheden werden gemiddeld om overeen te komen met het GPS-signaal in het midden van het voertuig. De hieronder getoonde mijl-lange koers, samen met een lengte- en breedtegraadgrafiek van de GPS, omvat een rotonde en een zigzagmanoeuvre.
Overzicht testbaan
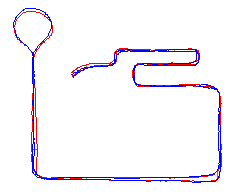
GPS-gegevens van testtrack
Ringleiding
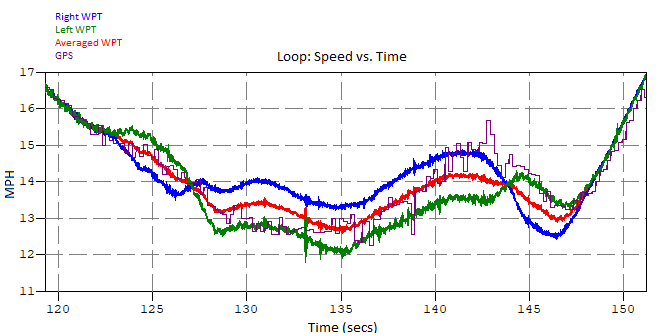
Als je tegen de klok in rond het cirkelvormige deel van de testbaan gaat (hierboven in het groen weergegeven), zou je verwachten dat de snelheid en afstand van het rechterwiel veel hoger zouden zijn dan dat van het linker. Kijkend naar de gegevens, hieronder weergegeven, blijkt dit waar te zijn. De rechter (blauw) en linker (groene) wielsnelheden zijn gemiddeld (rood) en komen bijna perfect overeen met de GPS-gegevens (paars).
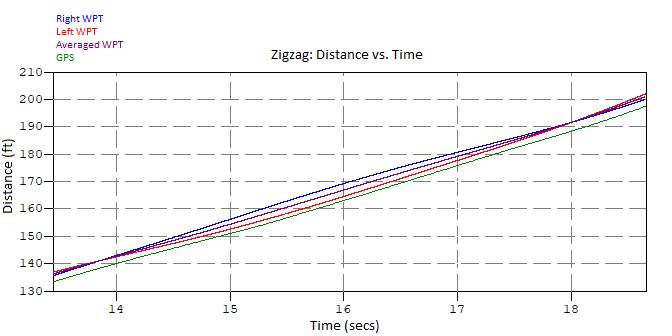
Zigzagpad
Het gebied met een snelle bocht naar rechts en links, weergegeven in het blauwe vierkant op de omtrek van de testbaan, biedt een ander interessant perspectief. Voor de onderstaande snelheidsgrafiek werd het voertuig gemanoeuvreerd met een snelle bocht naar links en vervolgens onmiddellijk naar rechts. De "W"-vorm die hierdoor wordt gecreëerd, laat zien dat het linkerwiel (paars) langzamer ging dan het rechter (groen) rond de bocht naar links, en vervolgens ging het linkerwiel sneller dan het rechter rond de bocht naar rechts. Terwijl de twee tegenover elkaar liggende partijen tijdens de manoeuvre van plaats wisselen, blijven het berekende gemiddelde (rood) en de GPS-gegevens (blauw) dicht bij elkaar in het midden.
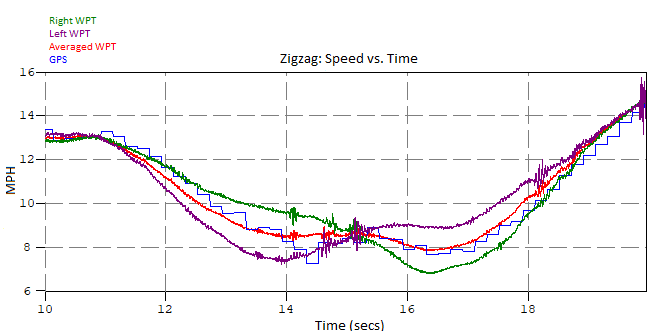
De tijd tussen de twee snijpunten in de onderstaande grafiek is waar de bochten naar links en naar rechts plaatsvonden. Het rechterwiel (blauw) overtreft het linkerwiel (rood) in afgelegde afstand, omdat het een grotere straal heeft om rond te gaan tijdens de bocht naar links, die begint rond 14 seconden en eindigt op ongeveer 15.5 seconden. Op dit punt heeft het rechterwiel verder gereden dan het linkerwiel. De bocht naar rechts begint net voor 17 seconden en het linkerwiel haalt het rechterwiel in tegen de tijd dat de bocht eindigt na ongeveer 18 seconden. De gemiddelde (paarse) afgelegde afstand blijft gecentreerd tussen de twee. Omdat de helling van de gemiddelde afstand en de GPS hetzelfde is, registreren ze nog steeds dezelfde snelheid en verandering in afstand. De GPS loopt echter een paar meter achter het stuur, vandaar de kleine afwijking in de gegevens.
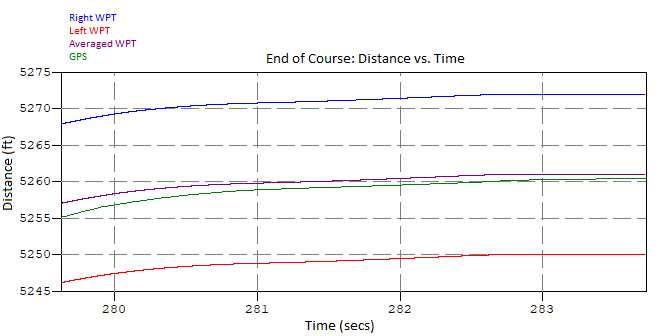
Fout
De laatste paar gegevenspunten van de test kunnen de voordelen aantonen van het gebruik van twee WPT's in plaats van slechts één. Als er slechts één WPT zou worden gebruikt, zouden de geregistreerde afstanden een maximale fout van 0.22% hebben. Door echter twee WPT's te installeren en deze te middelen, is de fout slechts 0.0115%, een afname van een factor 19. Dit toont aan dat het gebruik van twee wielpulstransducers kan helpen om fouten te verminderen die zich over meerdere beurten kunnen ophopen.
Deze test is slechts een van de vele verschillende tests die gebruik maken van Wheel Pulse Transducers. Het hebben van een duurzaam en nauwkeurig meetsysteem is gunstig voor het nauwkeurig volgen van de positie en snelheid van een voertuig in elke omgeving. Als u uw wieltesttoepassing wilt bespreken, contact opnemen met een vertegenwoordiger van Michigan Scientific <p></p>